|
 | Extreme Performance Mobility Scooter |  | Ian Hooper, January 2012 | |
A few months ago a couple of friends approached me with the crazy idea of setting the world record for the fastest Mobility Scooter. Apparently the record stood at around 100km/h, which seemed quite achievable with an electric drive. They also had an upcoming car show where their rally car was being displayed, and wanted a novelty vehicle to gain some extra exposure.
So we purchased a second hand vehicle from a local shop (much like the one pictured right), and set to work.
|
|
 |
After measuring up, we decided on drivetrain components. The largest motor we could fit easily was the Motenergy ME0709, which is rated at 72V and 100A continuous. For an economical but powerful motor controller, we opted for an Alltrax 7245, offering up to 450A peak at 72V. Due to space constraints, we had to run a pretty compact battery pack, but one offering high power. Another friend of mine had previously purchased some A123 20Ah pouch cells for his electric racing motorbike, which may or may not be authentic A123 cells, but certainly offered a lot of power. So we ordered a 72V 20Ah pack from his supplier, which would come pre-assembled with BMS.
|
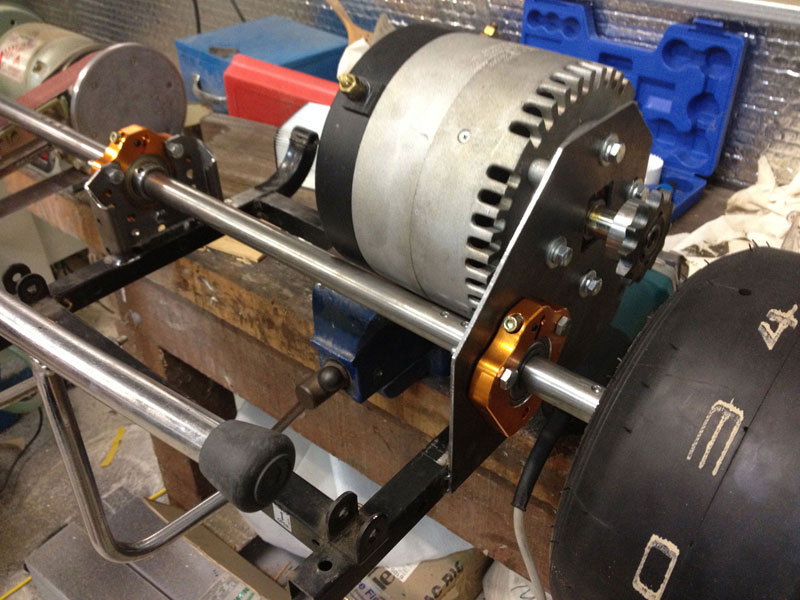
We calculated a reduction drive of about 1.5:1 would be suitable, giving over 100km/h top speed with good acceleration. To achieve this we decided that chain drive would be the easiest, using readily-available industrial parts (similar size to motorbike chain) from local company Transeals. The motor runs a 12T sprocket, to an 18T sprocket on the axle, both with keyed taperlock attachment.

New motor framework welded to rear end to accommodate go-kart axle and Motenergy motor |

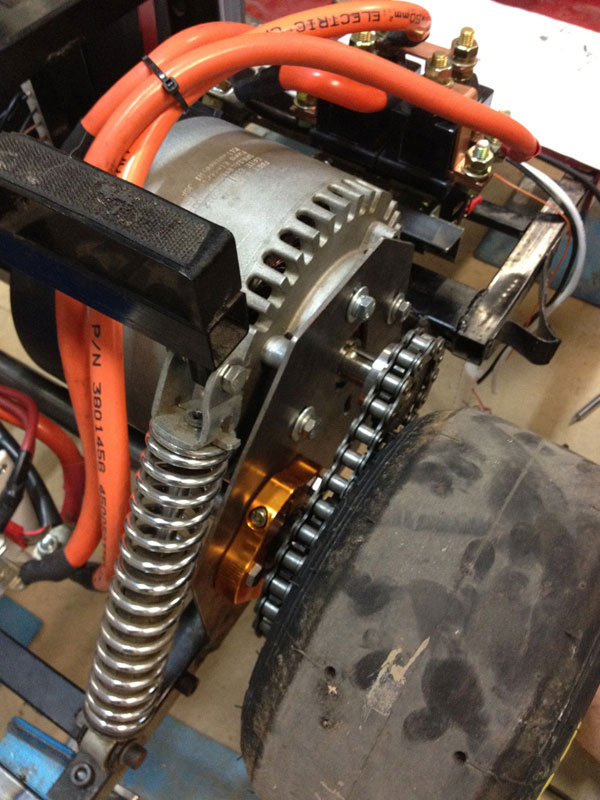
Close-up of chain drive
|
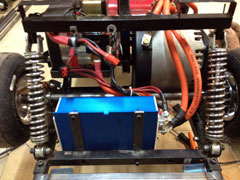
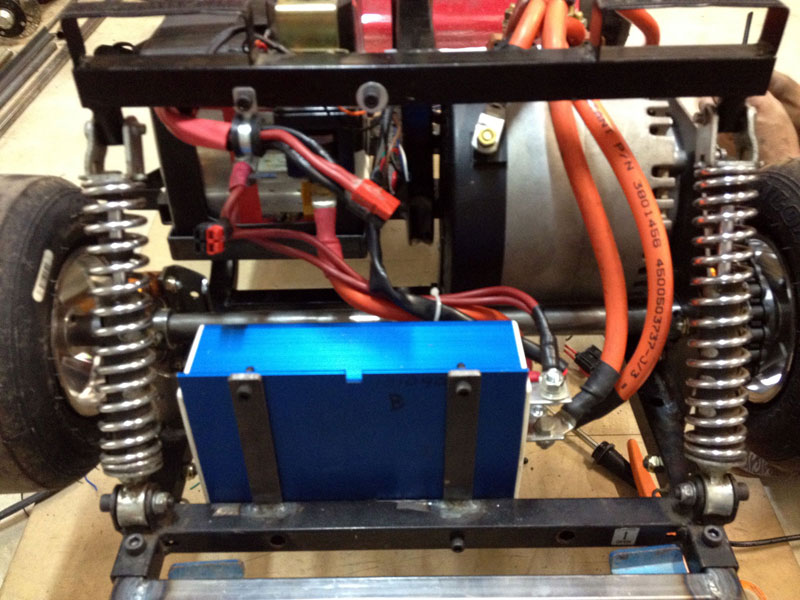
Drivetrain and power circuit |
Due to concerns over the strength, plus the desire to add mechanical braking, the front end was rebuilt using much sturdier steering arms/kingpins/etc from go-karts (parts sourced from KartMart). The go-kart hubs were modified with mounts for custom stainless brake discs, and brake calipers from DH mountain bikes added to the uprights.
As well as being much stronger, the go-kart equipment had significantly higher camber and kingpin inclination, which aids in the stability at high speeds. One drawback with the go-kart equipment was the very large scrub radius (distance from the steering pivot to the middle of the wheel) which limits steering angles due to interference with bodywork, but it was a necessary sacrifice due to space constraints.
The front suspension remains a little lighter than we would like (considering the shock loading that comes from doing wheelies) and may need upgrading at some point with heavier duty shocks and pivots. |

Revised front end showing go-kart steering and custom brakes |
Once the mechanical work was complete, we began work on the wiring. It's a very simple traction circuit similar to the one on our Tech Info: Circuits page. We used 35mm² power cabling from the battery to the controller, and 50mm² cabling from controller to motor (where average current is higher). A 400A ANE-type fuse is installed close to the battery pack for circuit protection.
Contactor control is using the original key switch, plus we added a second key switch toggling the controller's Half Speed input, intended to allow the uninitiated to drive it more safely, though it doesn't help much since the front wheels can still lift on Half Speed. The reversing contactor is actuated by a three position switch on the dash we re-used, giving Forward, Neutral and Reverse setting. Chris managed to modify the existing throttle mechanism with a 0-5kohm resistive throttle range for the Alltrax controller. That said, the existing hand throttle is a little lightweight/flimsy for a system running so much power, and we may upgrade to a twist grip or foot pedal at some stage.
|
|
|
| |
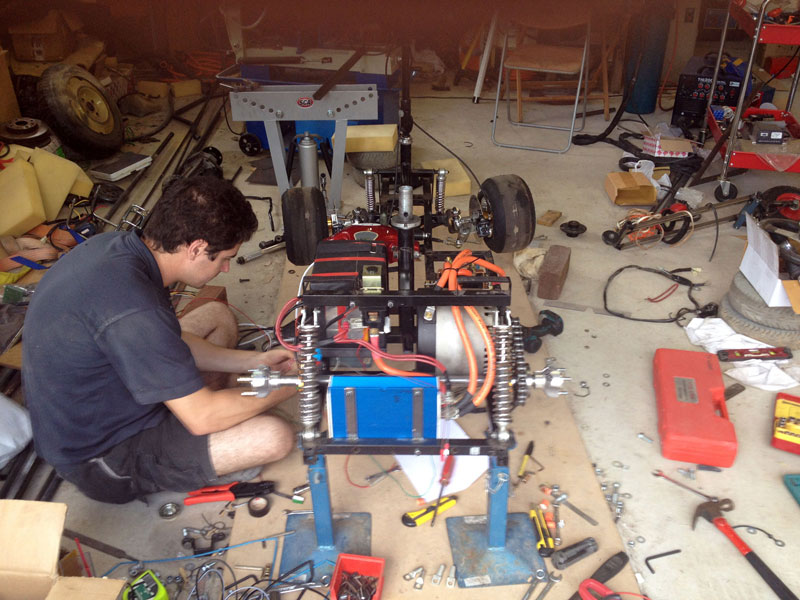
Some progress shots with Chris hard at work on wiring, testing and installation |
Summary of components
- Batteries: 24x A123 20Ah LiFePO4 pouch cells, 24S1P (72V 20Ah)
- Motor: Mars ME0709
- Controller: Alltrax 7245
- Main contactor: Nanfeng ZJW400A
- Reverse: Nanfeng ZJW400-2T
- Fuse: ANN type, 400A
- Charger: Kingpan KP7212CL
- DC/DC: 72V-12V 10A, from electric scooter
- Drive system: Industrial chain drive, 12T to 18T
- Front end: Go-kart steering system mated to original suspension
- Brakes: Avid hydraulic, stainless steel discs
Performance figures
- Max torque: 120Nm at rear axle
- Top speed: ~100km/h
- Range: ~20km if driven mildly
|

Picture of the completed kart, looking original other than the slick tires.. |
Discussion
The vehicle lived up to all expectations, and is rather scary to drive due to the terrible weight balance and handling of this type of vehicle. Wheelie bars were a necessity to prevent the vehicle tipping over backwards under acceleration. However the electric drivetrain is very smooth and predictable, depsite being literally 100x more power than the vehicle originally had. Here are a couple of pictures which give an idea of the vehicle's performance..

Josh doing wheelies |

Static burnouts at the motor show |
Future work includes tidying up the wiring, beefing up the suspension, installing a sturdier throttle mechanism, and combining the brake circuits for actuation by a single lever (instead of having separate levers for each wheel, which is difficult to balance by hand). We may also upgrade the battery pack wiring and BMS, since it is only rated to 80A continuous while the cells (and the rest of our circuit) should be good for a fair bit more power.
~Ian Hooper, Jan 2012
Comments| | Tristan on 29th Jan 2013
Could you do the same for a little 125cc scooter?
I'd love to convert my petrol scooter to an EV. | | |  | | | Ian Hooper on 29th Jan 2013
Hi Tristan, yeah for sure, much the same drivetrain we used in the Gofer is often used in electric motorbike and scooter projects. The ME0709 motor and AXE7245 controller we used is probably close to 250cc performance, to replace 125cc performance you could go a little smaller e.g ME0708 motor and AXE4844 controller. |
|
|